基于光谱标定的光频扫描干涉绝对测距方法研究
时间:2021年11月15日 分类:经济论文 次数:
摘要光频扫描干涉(FSI)绝对测距技术具有精度高、灵敏度好等优点,受到了大型装备制造领域的广泛关注。为获得更高的测距精度,FSI系统中往往需要通过构建光纤辅助干涉仪以实现对光频变化的精密监测。然而,受环境因素以及色散效应影响,光纤辅助干涉仪的光程难以在测量过程中维持稳定,导致测量精度严重下降。针对这一问题,本文提出了一种基于光谱标定的光频扫描干涉绝对测距方法,采用HCN气体的吸收光谱特征为FSI系统辅助干涉仪光程的在位快速标定提供稳定、精确的光频参考;同时,提出了一种色散失配误差的快速补偿方法以消除光纤辅助干涉仪引入的色散失配误差对测量结果的影响。为验证上述方法的有效性,在20的距离上与商用干涉仪进行精度对比实验。实验结果表明,在测量范围内该系统的最大测距偏差小于μm,测量重复性优于4μm。
关键词光频扫描干涉;绝对距离测量;吸收光谱;色散效应
1引言
长距离、高精度测距技术是大型装备制造领域的重要支撑技术之一,在飞机装配、船舶制造、大型科学仪器建造等工程和科学任务中得到了广泛的应用[1-5]。随着制造领域向数字化、信息化、智能化的方向转变,其在测量精度、测量效率、测量灵活性以及现场溯源的能力等方面对现有的测距技术提出了新的需求[6-9]。
自上世纪八十年代起,光频扫描干涉(FSI)测距技术以其优越的测量精度与灵敏度受到了广泛的关注,其优秀的测量灵活性与灵敏度赋予了其在回光较弱甚至无合作目标情况下完成距离测量的能力,极大丰富了其潜在应用场景[10-16]。目前,FSI测距方法已可以在几十米的范围内获得优于5×10-7(0.5ppm)的相对测距精度,与商用干涉仪相当,完全能够满足大尺寸制造领域对测距精度的需求,展现出极大的应用潜力与研究价值[17-18]。
光谱学论文范例:基于多模光纤的高分辨率光谱仪
在FSI系统中,距离的测量主要通过解算光频变化与干涉信号相位变化间的线性关系实现,因此,高精度的光频测量手段是保证FSI系统测距精度的关键。早期FSI系统仅依靠激光器注入电流与输出光频变化间的线性关系估算光频变化,受限于驱动电流的控制精度水平,该类系统的测距精度难以突破10-4量级[19]。1995年,德国弗朗禾费研究所的J.Thiel等人在FSI测距系统中构建了一条光程差约为2.7m的微晶玻璃辅助干涉仪,并通过测量与辅助干涉仪信号相位变化间的线性关系解算被测距离,在40m的距离上获得了±40μm的测量不确定度,为FSI系统中光频变化的精密测量提供了新的思路,然而受体积限制,空间光路辅助干涉仪并不适合在工业现场实现[20]。
2005年,密歇根大学的Hai-JunYang等人采用一台高精细度(>200)的法布里珀罗干涉仪(Fabry-Perotinterferometer,FPI)对FSI系统中激光器的输出光频进行监控,实现了对绝对距离以及振动的高精度测量,最终该系统在0.1m到0.7m的测量范围内获得了50nm左右的测距精度,该系统测量精度较高,但只适用于环境稳定的实验室环境[21]。2013年,清华大学的吴学健等人提出通过飞秒光频梳对可调谐激光器的光频进行校准,以此提升激光频率扫描的精度,并以此搭建了一套外差FSI测距系统,在1m的距离上测距精度优于5μm[22]。
然而,飞秒光频梳较高的成本使其目前难以在工业场景下推广应用。2014年,天津大学的时光等人设计了一种双光路FSI系统,利用长光纤搭建的参考干涉光路的信号作为时钟用于测量光路干涉信号的重采样,系统紧凑,有效解决了传统空间光路辅助干涉仪的体积限制,最终在10m的测量距离上获得了50μm的分辨力[23]。在此之后,关于FSI系统中光频测量方法的相关研究主要集中于采用FPI、飞秒光频梳以及辅助干涉仪三类方法的改进与组合,以弥补各类方法的缺陷,提升系统测距精度[24-25]。工业测量现场不仅需要测距系统提供高精度的测量结果,同时还对系统的可靠性、稳定性以及经济性提出了要求。
综合考虑系统精度、体积以及成本,构建光纤辅助干涉仪仍是目前的FSI测距系统中最为经济可靠,同时也是应用最为广泛的光频测量手段。为获得更高的光频测量精度,辅助干涉仪的光程往往需要达到几十甚至上百米,然而,受温度变化等环境因素影响,延时光纤的光程难以在测量过程中维持稳定,导致作为长度参考的辅助干涉仪光程发生漂移。此外,光纤的色散效应会在光频调谐过程中引入额外的相位变化,导致测量干涉仪与辅助干涉仪间的色散失配,降低测距精度。针对上述问题,本文研究了基于光纤辅助干涉仪的FSI测距系统原理,讨论并分析了环境温度变化与色散失配对最终测距精度的影响。
在此基础上,提出了基于吸收光谱的光纤辅助干涉仪光程标定方法,通过特定吸收气体为FSI测距系统提供稳定、可溯源的光频参考,在最小化系统成本与体积的前提下实现了FSI系统中光纤辅助干涉仪光程的在位快速标定。同时,提出了色散失配误差快速补偿算法,通过二阶多项式拟合标定了光纤辅助干涉仪标定过程中的色散系数,并消除了色散失配误差对测距结果的影响。最后,通过实验验证了上述方法的有效性,与商用干涉仪在20m的测量距离上进行精度对比实验结果表明,系统的最大测距偏差小于50μm,测量重复性优于±4μm。
2FSI测距原理与误差模型
可调谐激光器发出的激光经光纤传导后被光纤耦合器分为两部分,一部分进入测量干涉仪,经耦合器、环行器、准直器等射向目标表面并返回,在光电探测器位置与参考光发生干涉,完成对目标的绝对距离测量;另一部分进入辅助干涉仪,经过一段由长延时光纤构建的马赫曾德光纤干涉仪后发生干涉,实现对激光器光频的监控。根据上述推导可以发现,FSI系统中被测距离主要根据测量与辅助干涉信号的相位变化比例关系、辅助干涉仪的光程以及空气折射率解算。其中,作为长度参考的辅助干涉仪光程直接影响测距精度,因此需要长期保持高度的稳定性。然而,作为一种对环境因素敏感的光学元件,光纤容易受到室温变化以及色散效应的影响。
一方面,在开放或半开放的工业现场,环境温度波动剧烈,光纤的等效折射率随之发生变化,以典型的SMF28单模光纤为例,其折射率随温度的变化系数约为×10~12×10,不同温度下辅助干涉仪的光程将存在巨大差异。另一方面,FSI系统的调谐范围一般可达100GHz~1THz,由于光纤介质存在较强的色散效应,因此在单次光频调谐过程中辅助干涉信号相位还包含了色散效应引入的额外相位变化。而在由空气光路构成的测量干涉仪信号中,色散效应的影响却可以忽略不计,这也导致了两路干涉信号间存在色散失配问题,降低测距精度。
3光程标定与色散失配误差补偿方法
通过上述仿真结果可以看到,辅助干涉仪的光程漂移以及色散问题对FSI系统的测距精度造成了严重的影响,必须采取措施予以修正。针对上述问题,本节提出了基于吸收光谱的光纤辅助干涉仪光程标定方法,以解决恶劣环境下FSI系统中辅助干涉仪光程的长期稳定性问题;接着提出了基于二次多项式拟合的色散失配误差补偿方法,在修正色散失配误差的同时提供了标定过程所需的色散啁啾系数。
3.1基于吸收光谱的光纤辅助干涉仪光程标定方法
环境温度对辅助干涉仪光程的影响严重限制了FSI系统的测距精度,一般通过定期标定辅助干涉仪光程解决:利用商用干涉仪提供标准长度,并采用待测FSI系统对该段距离进行测量,最后通过逆向使用测距公式完成标定过程。该方法需要长直线导轨作为辅助装置,操作繁琐,无法在工业现场实现。因此亟需研究一种高精度、可溯源的快速现场标定方法,实现辅助干涉仪光程的在位更新。
2014年,牛津大学的JohnDale等人将经NIST标定的标准HC13N气体吸收池应用于FSI系统中,实现了辅助干涉仪光程的在线校准,并取得了良好的效果,最终在0.2m~20m的测量范围内获得了0.41ppm的相对不确定度[27],为解决上述问题提供了新的思路。然而,该方法仍存在一定局限性:首先,标准气体吸收池的吸收谱线与气体压强相关,受加工精度的影响,很难做到与NIST提供的检定证书完全一致。其次,NIST提供的吸收峰对应波长精度仅为几个皮米,难以满足FSI测距系统的精度需求。
此外,上述实验中辅助干涉仪为通过铟钢搭建的自由空间辅助干涉仪,体积庞大,无法在工业现场实际应用,而在光纤辅助干涉仪在光频调谐过程中存在色散效应,将对标定结果产生影响,因此,必须对其进行补偿。针对上述问题,本文提出了一种基于吸收光谱的光纤辅助干涉仪标定方法:首先,采用锁定至铷钟的飞秒光频梳对气体吸收池的吸收光谱进行预先标定,由于飞秒光频梳具有丰富且准确可溯源的光谱特征,因此可以准确地确定吸收光谱间的距离,提升标定精度。可调谐激光器发出的激光分为三个部分,一部分与锁定至铷钟的飞秒光频梳经光学耦合器混合产生干涉;另一部分进入气体吸收池,透射信号被光电探测器接收;第三部分直接通过光电探测器接收,用于监控激光强度的波动。
可调谐激光器发出的扫频激光与飞秒光频梳发生干涉,产生多个不同频率的拍频信号,通过调节PD带宽或增加电学滤波器,滤出扫频激光与最近的一根梳齿产生的拍频信号。该信号的频率将随光频扫描呈现周期性改变。当拍频信号为零时,说明扫频激光与某一光频梳齿发生重合,此时扫频激光的光频即为该光频梳齿对应的光频。与此同时,经过气体吸收池的扫频光在特定谱线位置发生吸收,透射光强度发生下降,对信号强度进行归一化后,通过高斯拟合算法即可获得每根吸收谱线峰值对应的时间。通过光频梳测得的光频—时间曲线即可通过插值方法计算谱线间对应的光频差,从而实现对气体吸收池的精确标定。
接着将标定好的气体吸收池引入FSI系统中完成对光纤辅助干涉仪光程的标定,改进后的FSI系统如图6所示:可调谐激光器产生的激光被分为四部分,第一部分进入测量干涉仪,完成绝对距离测量;第二部分进入辅助干涉仪,实时监控可调谐激光器的输出光频;第三部分光经气体吸收腔透射被光电探测器接收,用于辅助干涉仪光程的标定;第四部分直接监控激光器的输出强度波动,并将其用于吸收光谱强度信号的归一化处理。
3.2色散失配误差补偿方法
根据第二节建立的色散失配误差模型,当辅助干涉仪存在色散效应时,其相位变化表现为扫频引起的一阶相位变化以及色散引起的二阶相位变化的叠加。针对这一特点,我们提出了一种基于二阶多项式拟合的色散失配误差修正方法:首先,与吸收光谱信号类似,为消除激光器光频调谐非线性问题,通过辅助干涉信号中过零点构建时钟信号,并基于此对测量干涉仪信号进行重采样。
4实验与讨论
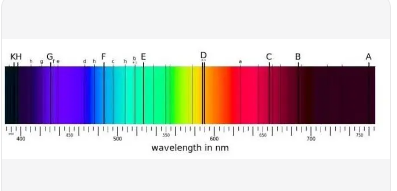
为评估上述方法的有效性,搭建了气体吸收池标定系统与FSI绝对测距系统并进行了验证实验。系统中,可调谐光源采用是德科技(Keysight)生产的81606A型可调谐激光器,实验过程中调谐速度及范围分别设置为20nm/s以及1520nm~1535nm。用于标定气体吸收池的飞秒光频梳(MenloSystem,FC_1500_250_ULN)重频设定为250MHz,并被锁定到铷钟上。气体吸收池选用WavelengthReference公司生产的混合气体吸收池(TRIH(80)-5/150/150-FC/APC),包含HCN,C12O,C13O三种气体,光谱范围覆盖1519nm-1632nm,其中HCN气体的吸收光谱,其能够在1519nm~1557nm的范围内提供54根吸收谱线,平均间隔0.6nm~0.7nm。
辅助干涉仪采用SMF-28型单模光纤搭建,延时光纤的长度约为110m。所有光电信号均通过光电探测器(PDB450C,Thorlabs)接收,并经一台高速数字化仪(NationalInstruments,PXIe-5162)以20MS/s的速度采集并存储到上位机,数据的处理通过Matlab离线实现。
首先,借助飞秒光频梳对气体吸收池的吸收光谱进行标定。由于光电探测器的饱和阈值较低,因此采用光学滤波器滤出调谐范围内的光频梳齿,并通过掺铒光纤放大器(EDFA)进行放大以提升干涉信号的强度。同时,为分离不同梳齿与可调谐激光干涉产生的拍频信号,光电探测器接收的信号经放大后通过一个带通滤波器(定制,带宽:4MHz,中心频率:3MHz)以筛选出特定的拍频。根据设定的调谐范围,在整个扫描过程中共能够产生26根吸收峰(R23branch~P2branch),重采样后的吸收光谱信号与光梳拍频信号。由于光谱吸收深度较低,信号中包含了大量随机噪声。为降低其对频谱拟合精度的影响,对信号进行低通滤波处理,滤除信号中的高频噪声成分。之后对每根梳齿进行高斯拟合可以看到,拟合曲线与原信号呈现了较好的一致性,能够准确地定位吸收峰对应的位置。
在完成了预标定工作后,首先采用该系统在不同的温度下对同一距离进行重复测量实验,以验证上述方法的有效性。由于实验室内环境温度相对稳定,难以有效调节,因此我们将光纤辅助干涉仪做防水处理后浸没于水中,使其温度随水温发生变化。通过使用温水自然降温的过程来模拟环境温度变化对辅助干涉仪光程的影响。
在此过程中,测距系统对同一目标的距离进行连续监测,与此同时,通过高精度温度计监测水温随时间的变化曲线。在实验过程中,为保证辅助干涉仪与水体温度保持一致,在实验前应先使系统静置1小时,以使辅助干涉仪与水温趋于相同。本实验中,开始测量时刻的水体温度为40.1℃,经约1.6小时后,降至30.3℃。整个过程中,FSI测距系统以大约20s一次的速度对目标距离进行连续测量,同时每5分钟记录一次水体温度。
红色曲线为水温随时间变化规律,紫色曲线为通过气室标定得到的光纤辅助干涉仪的光程,可以看出,二者变化趋势非常近似,这也印证了第二节推导的结论。图9(b)为系统在使用光谱标定辅助干涉仪前后对同一目标的测距结果,由于未标定的系统只能够采用0时刻的辅助干涉仪光程,随着温度逐渐降低,距离测量误差逐渐增大,在水温降低10℃后,测距误差已经达到了1.8mm左右,相较之下,通过气体吸收池标定后的FSI系统测距结果基本不变,这也证明了该方法的有效性。
最终在12m左右的距离上,该系统的测距标准差为68μm,相对重复性精度约为5.28×10,这一误差主要来自辅助干涉仪标定过程中的光程的随机波动,在实际应用中,温度变化相较于本实验更加缓慢,因此可以认为在多次测量的过程中,辅助干涉仪光程变化量极小,因此可以通过多次取平均的方法消除随机误差对测量结果的影响,进一步提升系统的测距精度。
5结论
针对大型装备制造领域对高精度绝对测距技术的需求,本文研究了基于光频扫描干涉的高精度绝对测距方法。针对FSI系统中光纤辅助干涉仪光程容易受环境因素影响的问题,提出了基于吸收光谱的光纤辅助干涉仪光程标定方法,通过特定气体精确且稳定的吸收光谱为辅助干涉仪的标定提供了高精度光频基准,实现了FSI系统长度参考的在位标定;同时,提出了色散失配误差快速补偿算法以消除宽带扫频引入的测距误差。上述方法通过精度对比实验得到了有效验证,最终该系统在20m的测量距离上获得了优于50μm的测距精度,测量重复性优于±4μm。
参考文献
[1]ZhaoJG,GuoHJ.StudyandApplicationofDigitalMeasurementTechnologyforAircraftAssemblyPrecision[J].AeronauticalManufacturingTechnology,2016,59(20):24-27.赵建国,郭洪杰.飞机装配质量数字化检测技术研究及应用[J].航空制造技术,2016,59(20):24-27.
[2]ZhaoX,YangHM,QiangJ,etal.High-PrecisioncoherentlaserrangingmethodbasedonKalmanfiltering[J].Actaopticasinica,2020,40(15):1412001.赵潇,杨海马,强佳,等.基于卡尔曼滤波的高精度相干激光测距方法[J].光学学报,2020,40(14):1412001.
[3]CuiPF,YangLH,LinJR,etal.Applicationoffemtosecondopticalfrequencycombinpreciseabsolutedistancemeasurement[J].Laserandoptoelectronicsprogress,2018,55(12):120011.崔鹏飞,杨凌辉,林嘉睿,等.飞秒光学频率梳在精密绝对测距中的应用[J].激光与光电子学进展,2018,55(12):120011.
作者:尚岳,吴腾飞,林嘉睿,杨凌辉,周强,邾继贵
SCI论文
- 2024-02-26SCI论文是全文收录吗
- 2024-08-16三类及以上期刊是什么
- 2024-07-17sci一区论文可以保研吗
SSCI论文
- 2023-11-1140本人力资源管理方向的ssci期刊
- 2023-04-07公共管理方向可以发ssci刊物吗
- 2023-06-14发ssci论文能查到吗查询流程
EI论文
- 2023-10-13ei论文查重高怎么降低
- 2023-03-28EI收录的都是英文期刊吗
- 2023-08-22计算机方向被ei检索的会议多吗
SCOPUS
- 2023-06-16scopus检索流程(方法)
- 2023-03-08ssci期刊和scopus期刊有交叉吗
- 2023-12-25艺术教育论文可以发到scopus吗
翻译润色
- 2023-05-11生物医学sci论文润色有用吗
- 2024-08-17英文论文怎么降重
- 2024-08-16国际中文期刊发表论文应该用什么
期刊知识
- 2022-10-09环境类英文期刊选择方法
- 2020-12-26能源领域学术期刊影响力大的期刊
- 2022-02-18有机材料相关论文发英文普刊能用
发表指导
- 2019-04-16论文审稿过程中能催稿吗如何催稿
- 2020-07-22农艺师评高级有什么要求条件
- 2020-03-06肾脏病学统计源核心期刊有哪些